Using the micro:bit to inspire students
Luke Spademan
70%
More girls said they would
choose Computing as a school subject
after using the micro:bit
Microbit Educational Foundation
https://microbit.org/research/
Using the micro:bit to inspire students
Luke Spademan
What is a micro:bit?
Micro:bit
Micro:bit
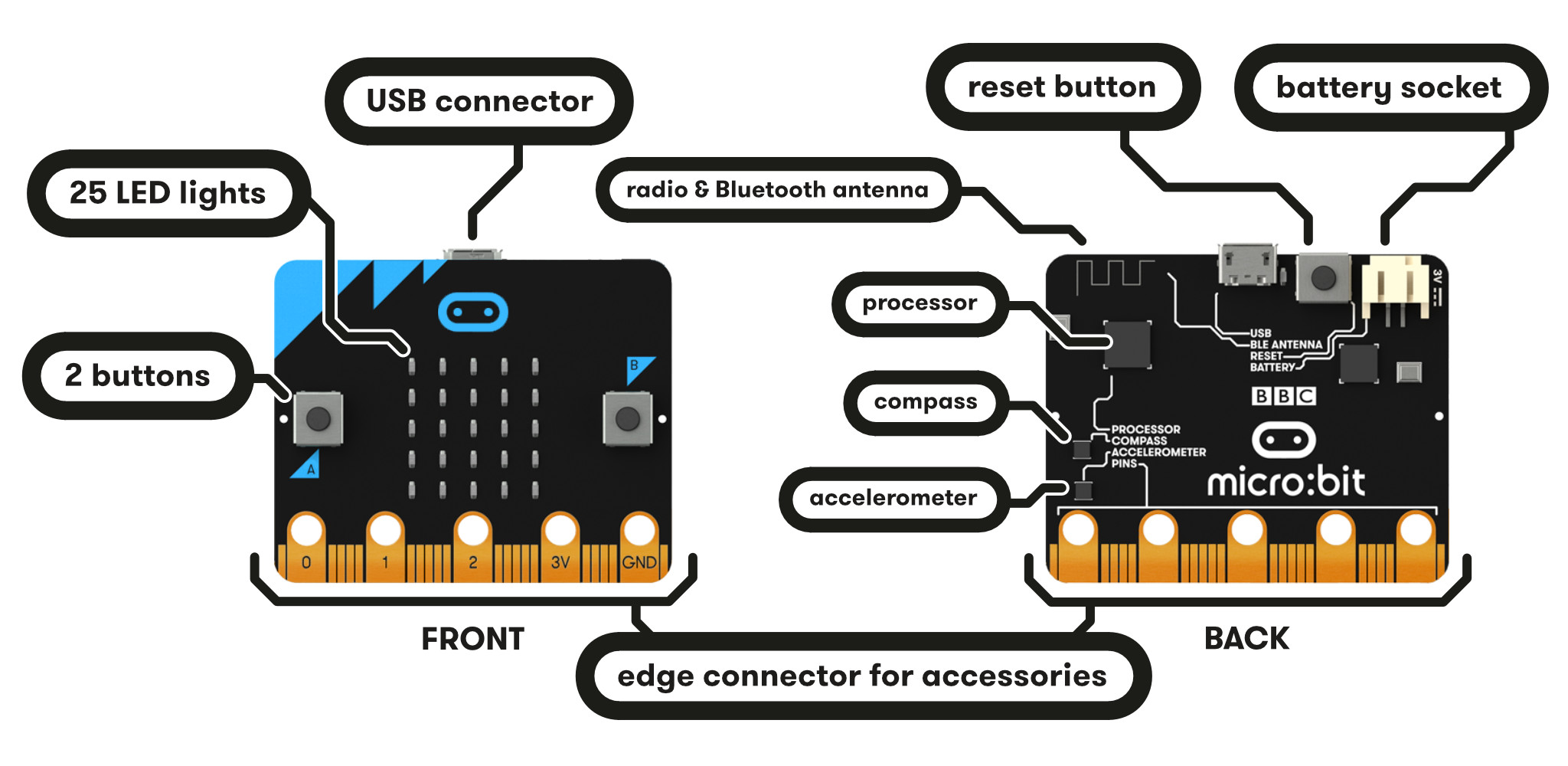
Micro:bit features
- 2 buttons
- 25 LEDs
- edge connector
- radio
- compass
- accelerometer
- USB port
- reset button
- battery socket
My Story
My Story
- In 2015 micro:bits were given to all UK years 7s
- I was in year 8
- I went to PyCon UK
- Micro:bits were being given out to attendes
- My dad and I got a micro:bit each
- I made a calulator that send answers to the other micro:bit
- I gave a lightenting talk about the project
My Story
- I made a game of conenct 3
- I added a colour display on a raspberry pi with a sense hat
- I gave a talk at PyCon UK the next year about the project
Mu
Nicholas Tollervey
Mu
“a simple Python editor for beginner programmers”
Mu
- Simple text editor
- Easy to use
- No bloat
- Built for the micro:bit
Mu's Features
- Python Editor
- Built in micro:bit flasher
- REPL
- Built in plotter
- Built in debugger
codewith.mu
How does this work?
First non-micro:bit program
print("Hello, World!")
Hello, World!
First micro:bit program
from microbit import *
display.scroll("Hello, World!")

“If the micro:bit is so great, why do I need a robotic arm?”
The same benefits but more
- You're moving a physical object
- You wrote the code to make it move
- More relatable to future applications
Demos
- Micro:bit is small
- Robotic arm is bigger
- Visual and Dramatic
Example
Equipment
Equipment
| Items | Link | Price (€) |
|---|---|---|
| Robotic Arm | lspade.xyz/l/roboticarm | 15,08 |
| Breadboard | lspade.xyz/l/breadboard | 2,75 |
| Jumper Wires | lspade.xyz/l/jumperwires | 3,97 |
| Edge Connector | lspade.xyz/l/edgeconnector | ~5,81 |
Setup
Servo Calibration
from microbit import *
angle = 90
while True:
if button_a.was_pressed():
angle += 5
pin0.write_analog(angle)
print(angle)
if button_b.was_pressed():
angle -= 5
pin0.write_analog(angle)
print(angle)
Code
Code: Setup
from microbit import *
servos = [pin0, pin1, pin2, pin16]
min_angles = [5, 50, 5, 5]
max_angles = [180, 130, 145, 180]
states = [5, 50, 5, 5] # position of each servo
s = 0 # current servo
d = 5 # angle increment
Code: Loop
while True:
if button_a.is_pressed():
states[s] += d
if states[s] > max_angles[s] or states[s] < min_angles[s]:
states[servo] -= d
d *= -1 # start moving in the other direction
servos[s].write_analog(states[s])
sleep(100) # wait 100ms before checking for press
if button_b.was_pressed():
s += 1
if s == 4:
s = 0
d = 5
Live Demo...
Other Projects
LEDs
from microbit import *
while True:
pin1.write_digital(1)
sleep(500)
pin1.write_digital(0)
sleep(500)
LEDs & Touch
from microbit import *
while True:
if pin0.is_touched():
pin1.write_digital(1)
else:
pin1.write_digital(0)
LEDs & Touch
Connect 3
Hacking the L-Light
Morse Code
from microbit import *
import music
lookup = {'.-': 'A', '-...': 'B', '-.-.': 'C', ...}
u = 75 # one time unit in ms
last = running_time() # records last press
# (for detecting end of letter)
code = [] # current morsecode input
Morse Code
def handler(symbol, duration):
if running_time() - last > 3*u: # morse code letters
# have 3 unit gap inbetween
code = []
display.show(symbol)
code.append(symbol)
music.pitch(300, duration, wait=True)
last = running_time()
sleep(u)
Morse Code
while True:
if button_a.is_pressed():
handler(".", u)
elif button_b.is_pressed():
handler("-", 3*u)
else:
if running_time() - last > 3*u:
v = lookup.get("".join(code), " ") # show nothing if
# input is invalid MC
display.show(v)